FANUC机器人程序实例:走轨迹(共3页)
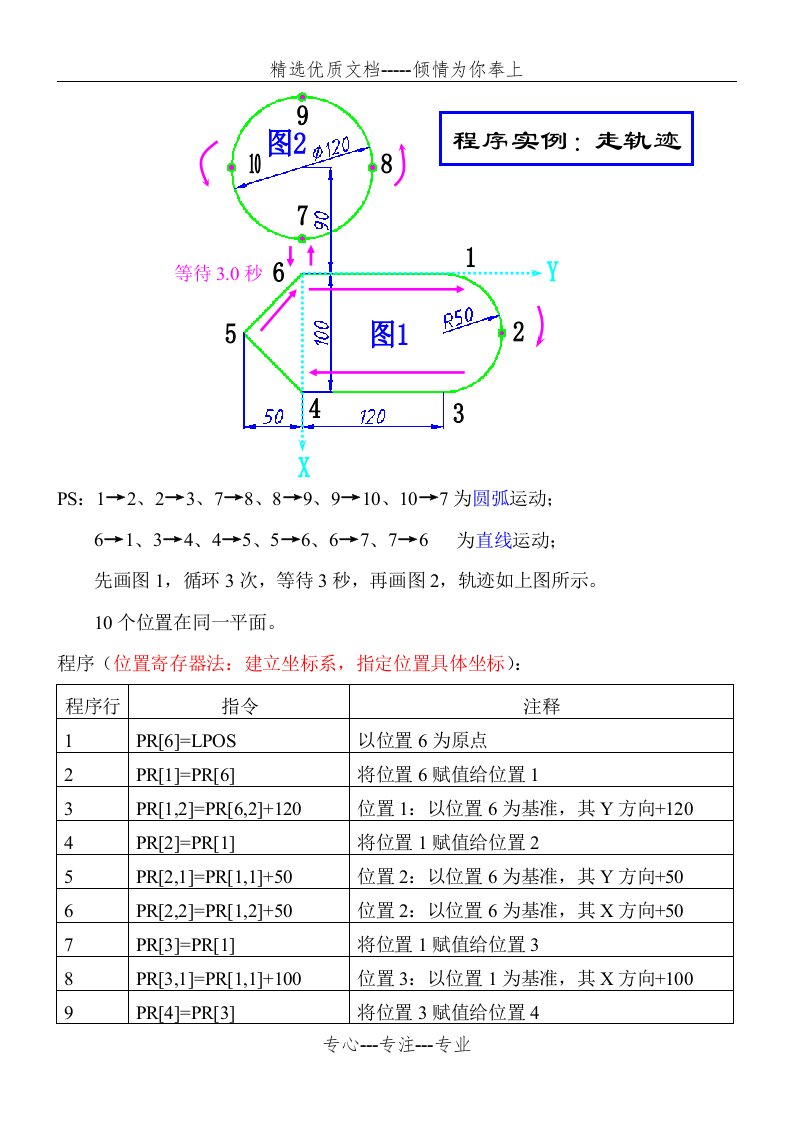
SHAPE \* MERGEFORMAT PS:1→2、2→3、7→8、8→9、9→10、10→7为圆弧运动; 6→1、3→4、4→5、5→6、6→7、7→6 为直线运动; 先画图1
FANUC机器人程序实例:走轨迹(共3页)

 FANUC机器人程序实例:走轨迹(共3页)FANUC机器人程序实例:走轨迹(共3页)
FANUC机器人程序实例:走轨迹(共3页)FANUC机器人程序实例:走轨迹(共3页)