基于simulink的模糊控制仿真
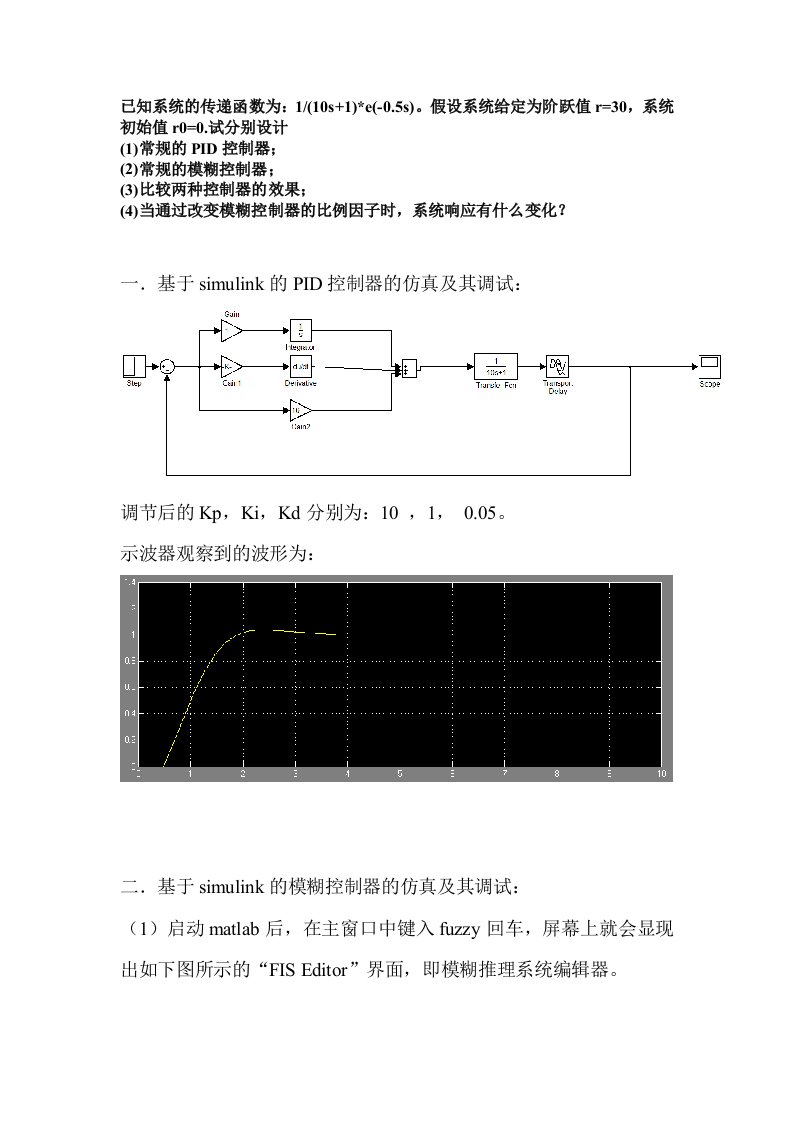
已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计常规的PID控制器;常规的模糊控制器;比较两种控制器的效果;当通过改变模糊控制器
基于simulink的模糊控制仿真

 基于simulink的模糊控制仿真基于simulink的模糊控制仿真
基于simulink的模糊控制仿真基于simulink的模糊控制仿真