已成功的小车黑白线程序
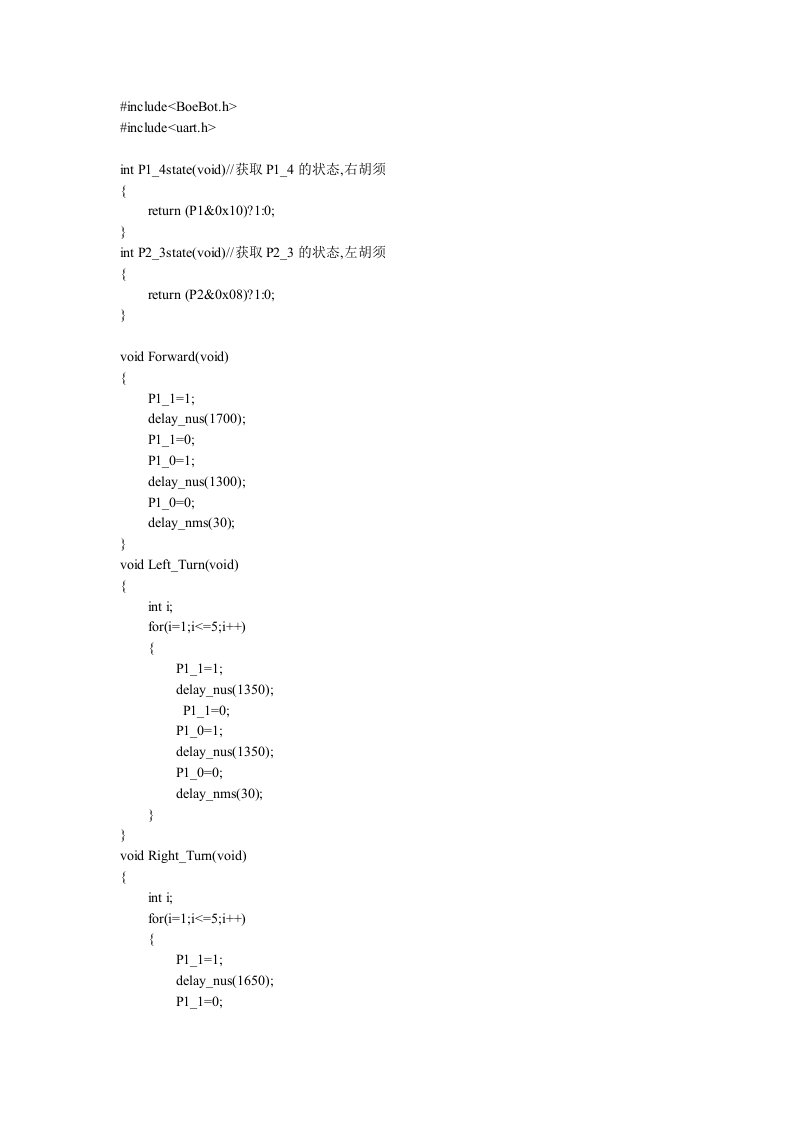
#include<BoeBot.h>#include<uart.h>int P1_4state(void)//获取P1_4的状态,右胡须{ return (P1&0x10)?1:0;}int P2_3
已成功的小车黑白线程序

 已成功的小车黑白线程序已成功的小车黑白线程序
已成功的小车黑白线程序已成功的小车黑白线程序