用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
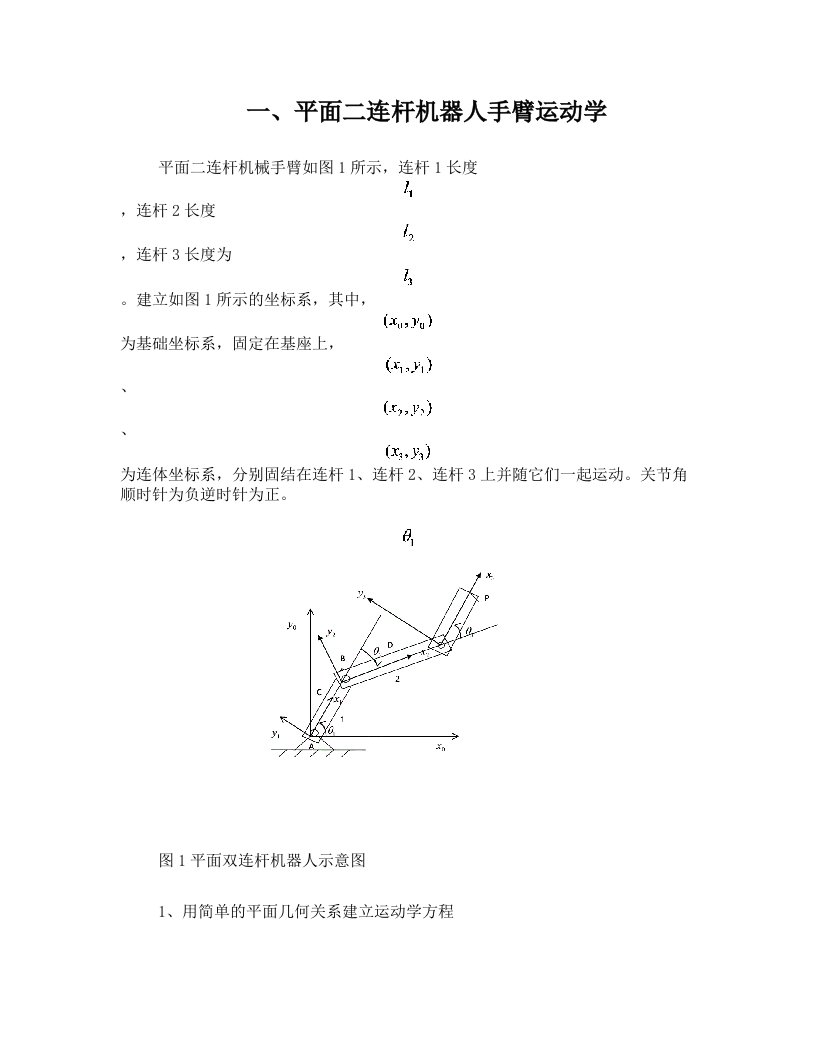
一、平面二连杆机器人手臂运动学平面二连杆机械手臂如图1所示,连杆1长度,连杆2长度,连杆3长度为。建立如图1所示的坐标系,其中,为基础坐标系,固定在基座上,、、为连体坐标系,分别固结在连杆1、连杆2、
用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程

 用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程