便携式移动机器人手持监控系统
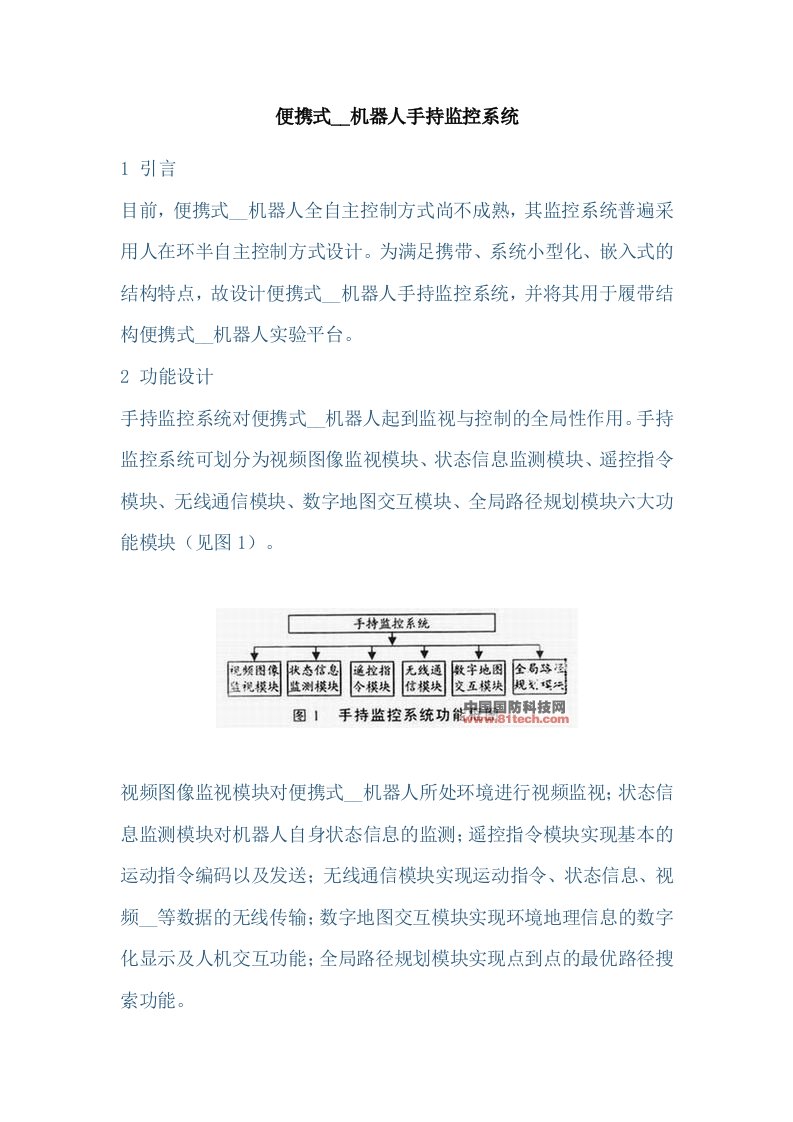
便携式__机器人手持监控系统 1 引言 目前,便携式__机器人全自主控制方式尚不成熟,其监控系统普遍采用人在环半自主控制方式设计。为满足携带、系统小型化、嵌入式的结构特点,故设计便携式__机器人手持监
便携式移动机器人手持监控系统

 便携式移动机器人手持监控系统便携式移动机器人手持监控系统
便携式移动机器人手持监控系统便携式移动机器人手持监控系统