ABB机器人的手动操作
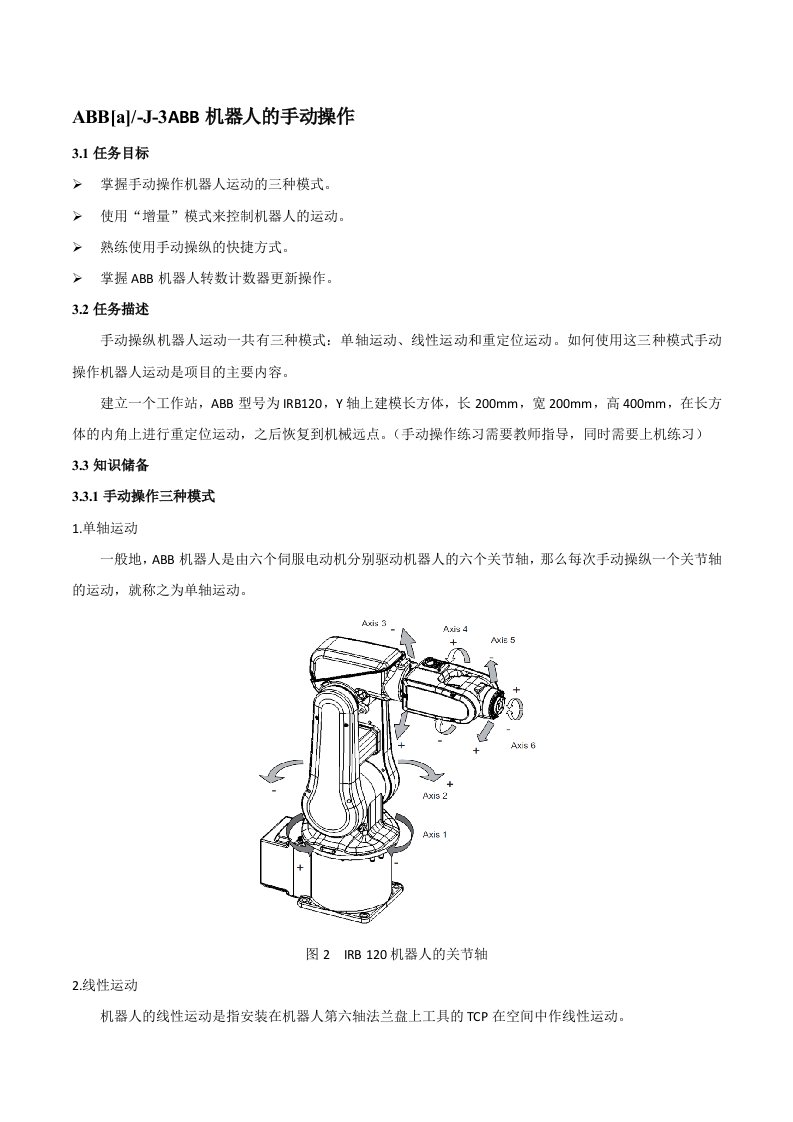
ABB[a]/-J-3ABB机器人的手动操作3.1任务目标掌握手动操作机器人运动的三种模式。使用“增量”模式来控制机器人的运动。熟练使用手动操纵的快捷方式。掌握ABB机器人转数计数器更新操作。3.2任
ABB机器人的手动操作

 ABB机器人的手动操作 ABB机器人的手动操作
ABB机器人的手动操作 ABB机器人的手动操作