机器人路径规划算法总结
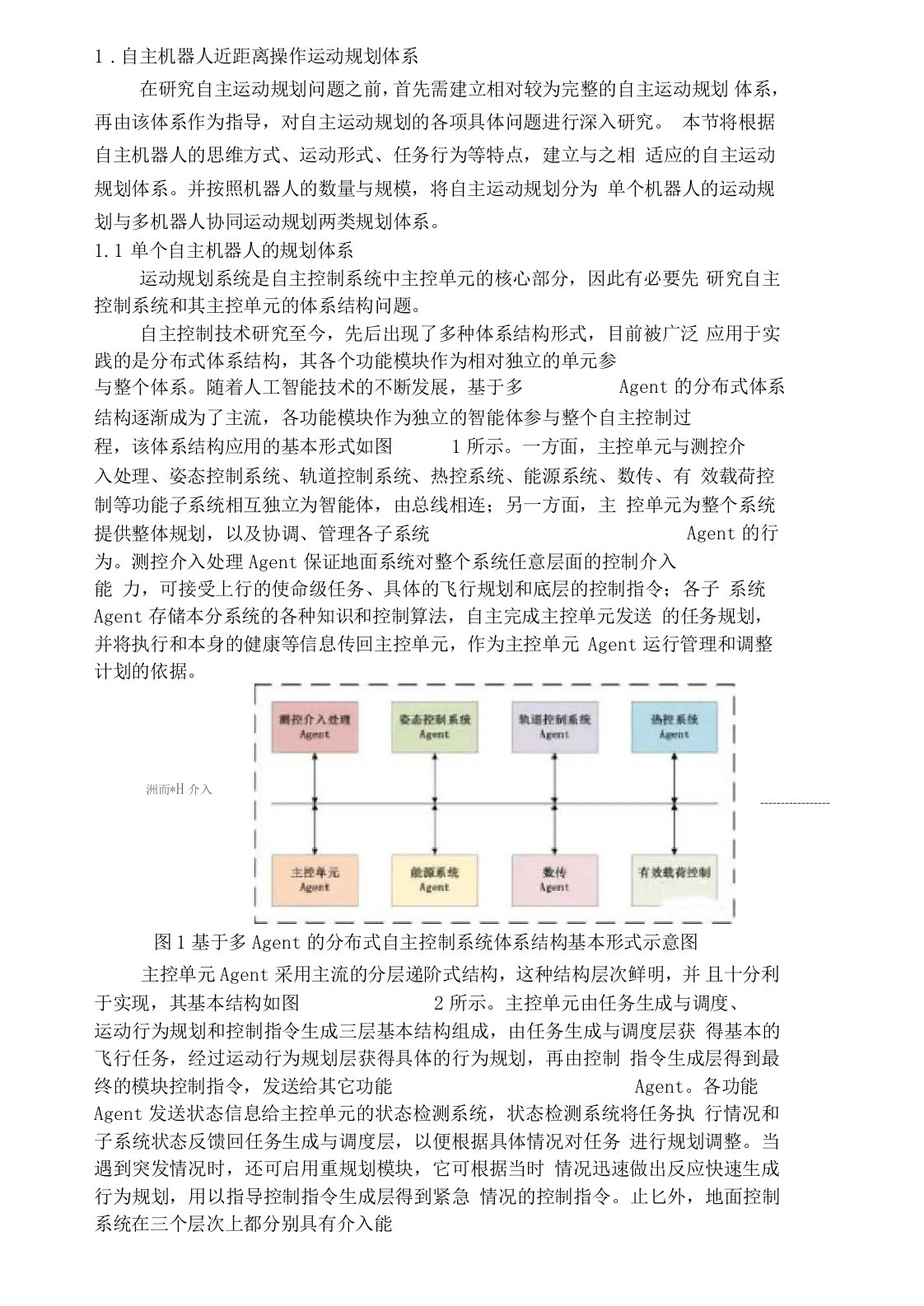
.自主机器人近距离操作运动规划体系在研究自主运动规划问题之前,首先需建立相对较为完整的自主运动规划 体系,再由该体系作为指导,对自主运动规划的各项具体问题进行深入研究。 本节将根据自主机器人的思维方式
机器人路径规划算法总结

 机器人路径规划算法总结机器人路径规划算法总结
机器人路径规划算法总结机器人路径规划算法总结