实验六基于Simulink的位置式和增量式PID仿真
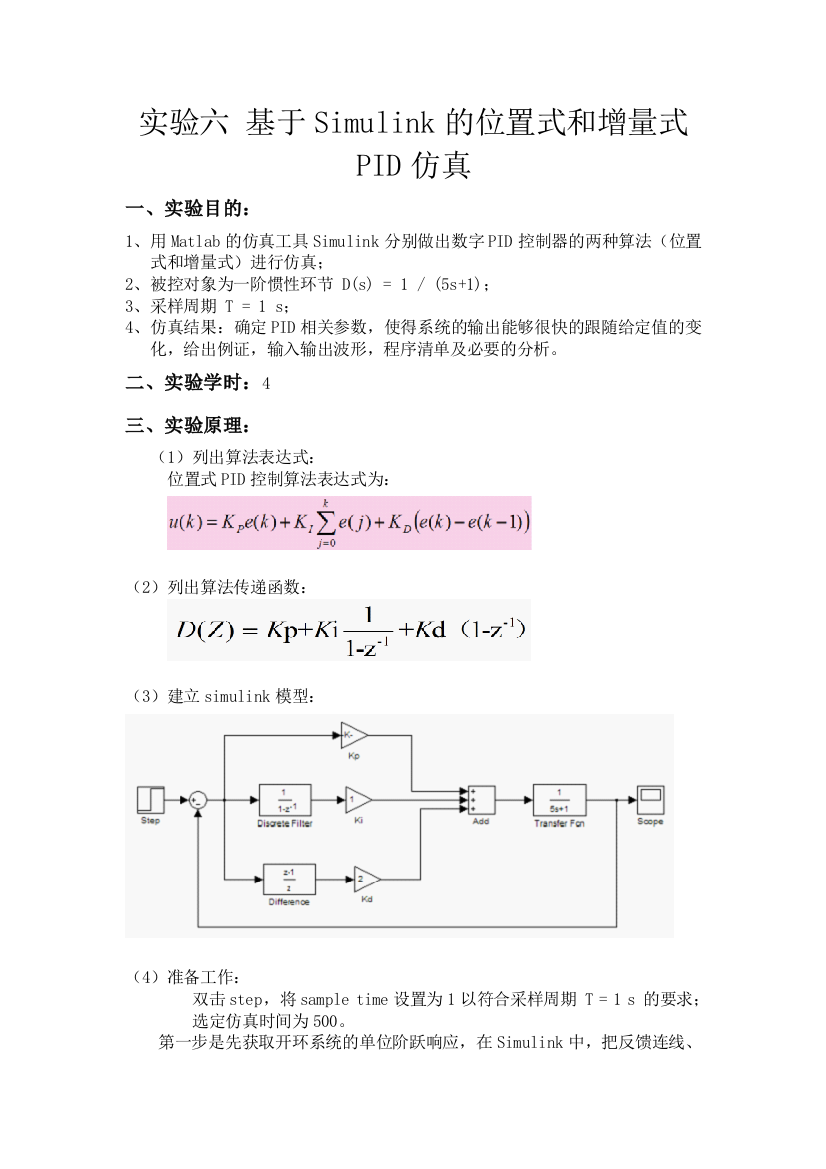
实验六 基于Simulink的位置式和增量式PID仿真一、实验目的:用Matlab的仿真工具Simulink分别做出数字PID控制器的两种算法(位置式和增量式)进行仿真;被控对象为一阶惯性环节 D(s
实验六基于Simulink的位置式和增量式PID仿真

 实验六基于Simulink的位置式和增量式PID仿真实验六基于Simulink的位置式和增量式PID仿真
实验六基于Simulink的位置式和增量式PID仿真实验六基于Simulink的位置式和增量式PID仿真