机器人线性控制
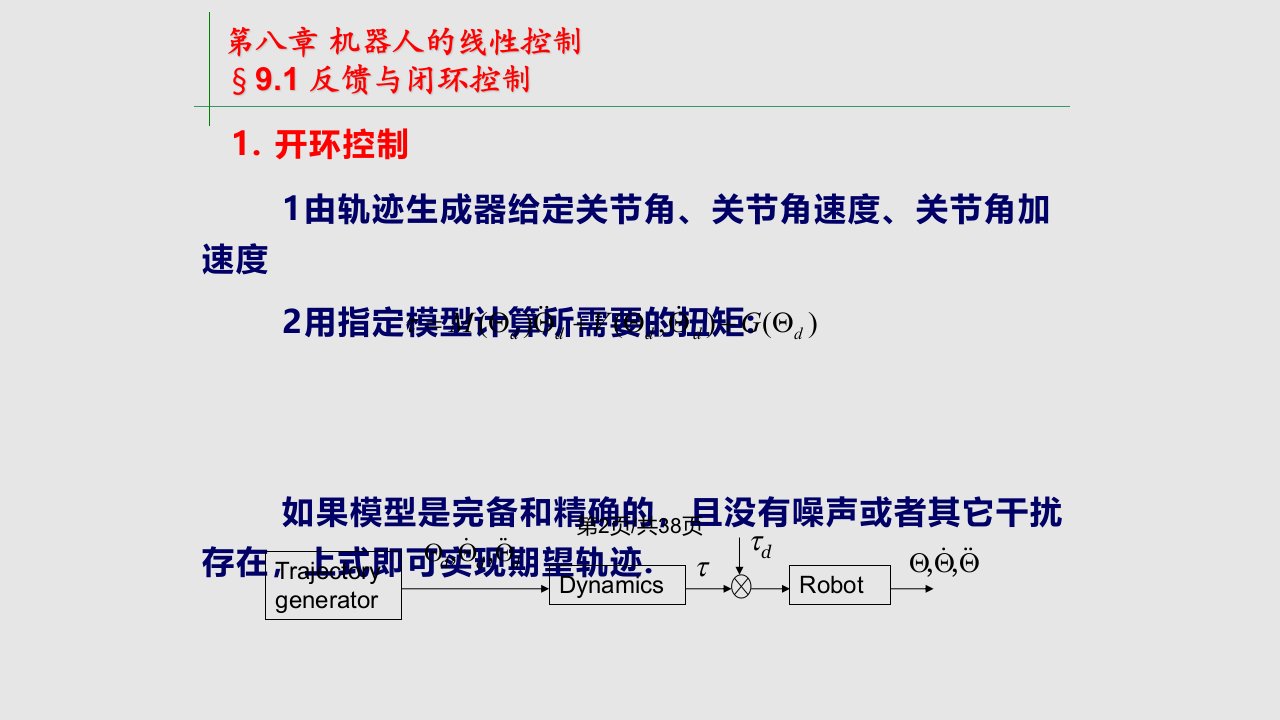
- 1. 开环控制 1由轨迹生成器给定关节角、关节角速度、关节角加速度 2用指定模型计算所需要的扭矩: 如果模型是完备和精确的
机器人线性控制

 机器人线性控制机器人线性控制
机器人线性控制机器人线性控制