第五章 2 状态观测器和滤波器
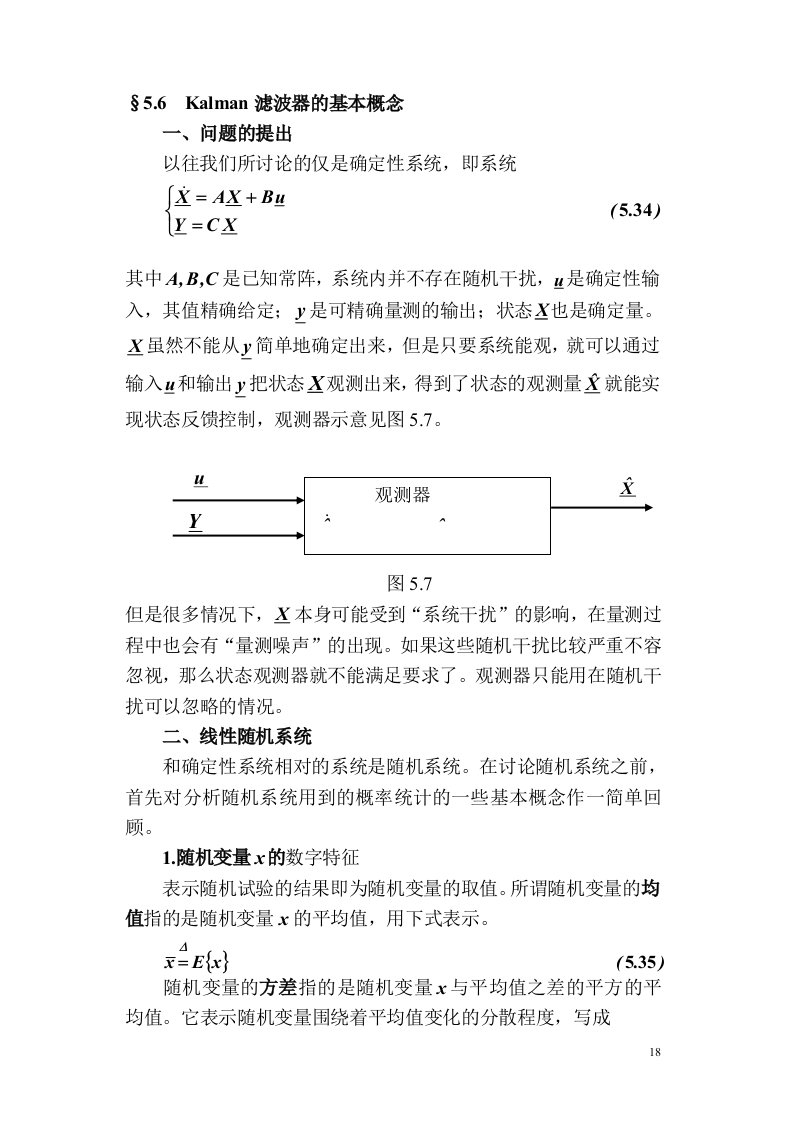
§5.6 Kalman滤波器的基本概念 一、问题的提出 以往我们所讨论的仅是确定性系统,即系统其中是已知常阵,系统内并不存在随机干扰,是确定性输入,其值精确给定;是可精确量测的输出;状态也是确定
第五章 2 状态观测器和滤波器

 第五章 2 状态观测器和滤波器第五章 2 状态观测器和滤波器
第五章 2 状态观测器和滤波器第五章 2 状态观测器和滤波器