单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料
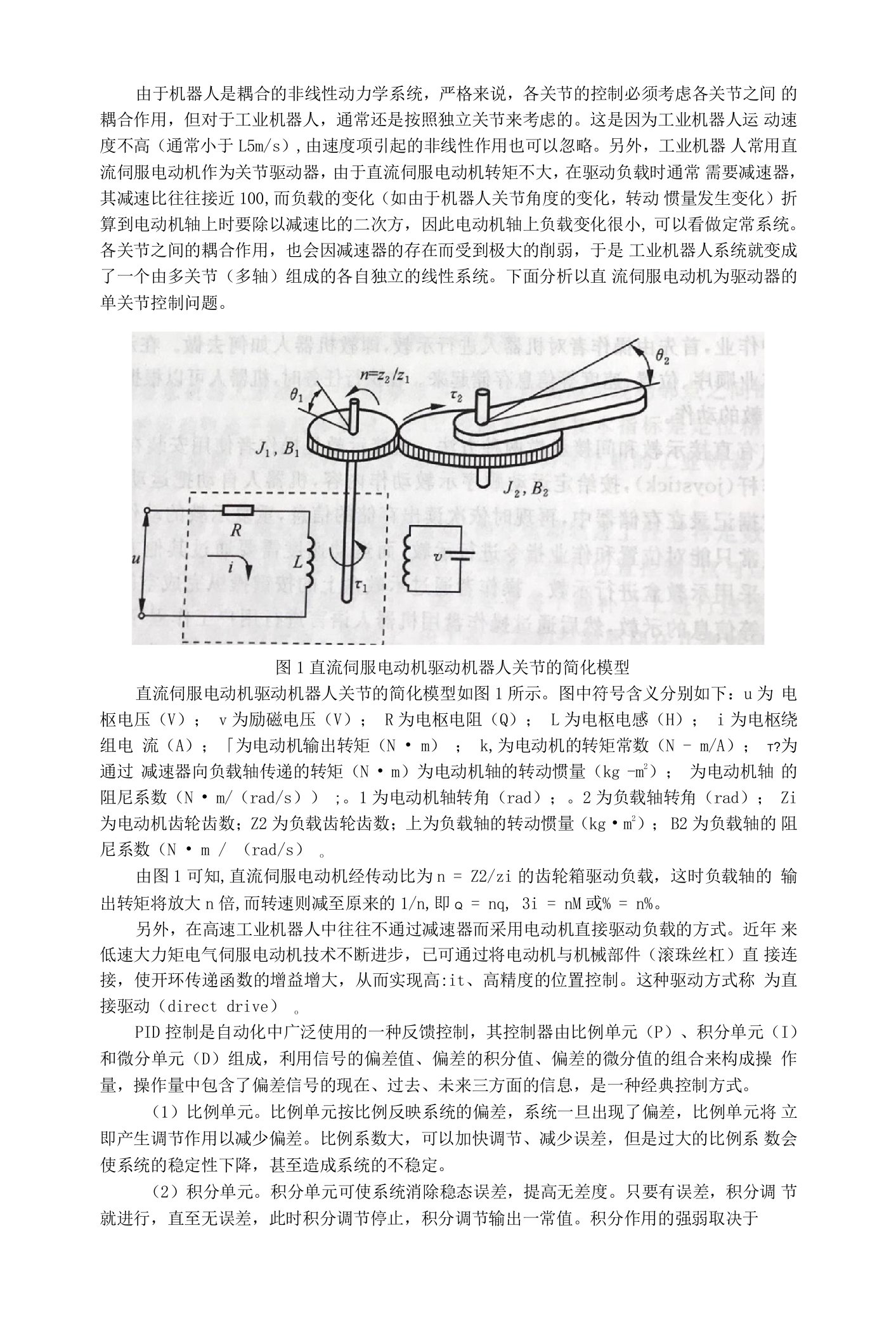
由于机器人是耦合的非线性动力学系统,严格来说,各关节的控制必须考虑各关节之间 的耦合作用,但对于工业机器人,通常还是按照独立关节来考虑的。这是因为工业机器人运 动速度不高(通常小于L5m/s),由速度
单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料

 单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料
单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料单关节机器人模型和控制 工业机器人技术基础 延伸阅读资料