实验一 机器人运动学实验
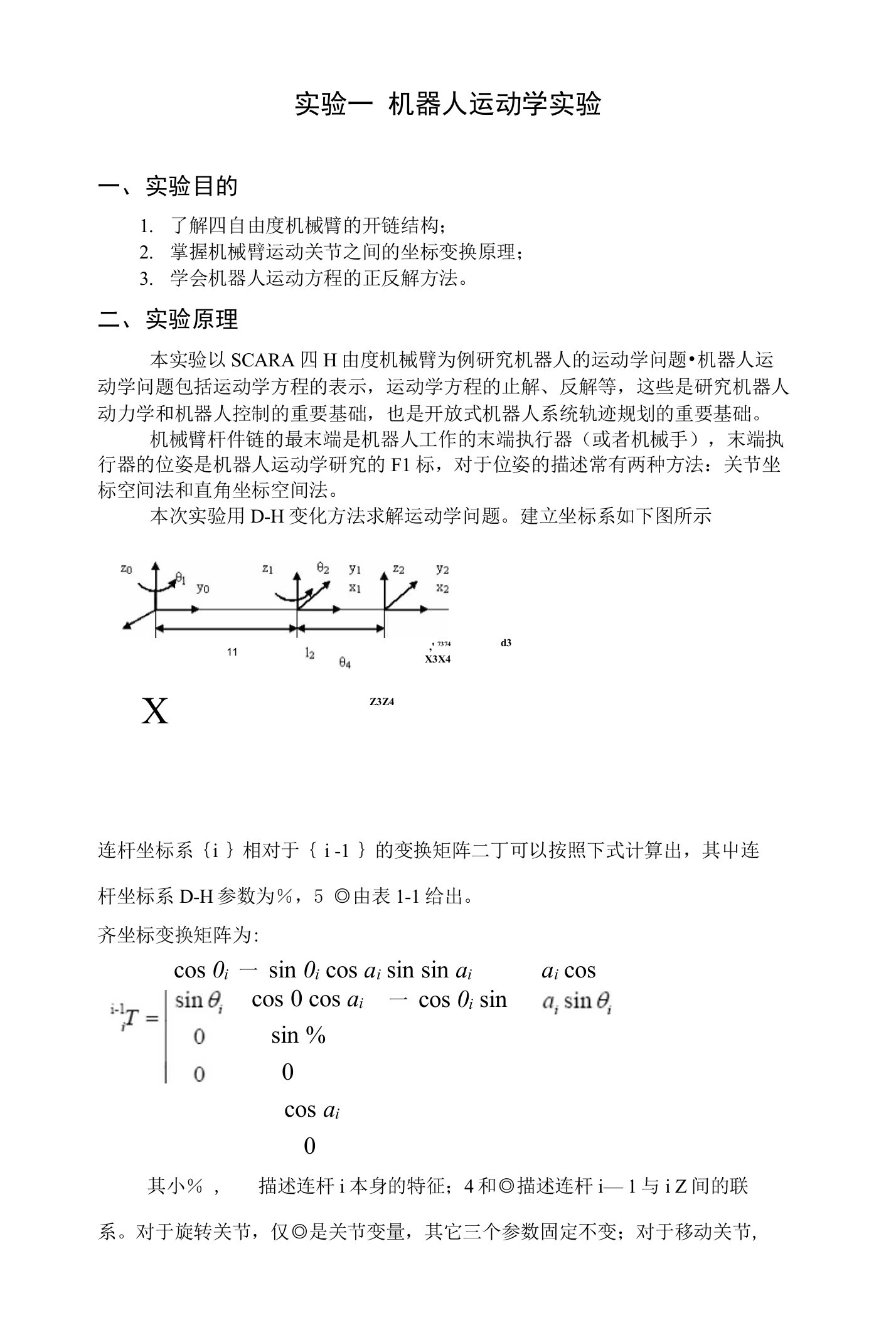
实验一 机器人运动学实验一、 实验目的了解四自由度机械臂的开链结构;掌握机械臂运动关节之间的坐标变换原理;学会机器人运动方程的正反解方法。二、 实验原理本实验以SCARA四H由度机械臂为例研究机器人的
实验一 机器人运动学实验

 实验一 机器人运动学实验实验一 机器人运动学实验
实验一 机器人运动学实验实验一 机器人运动学实验