机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立)
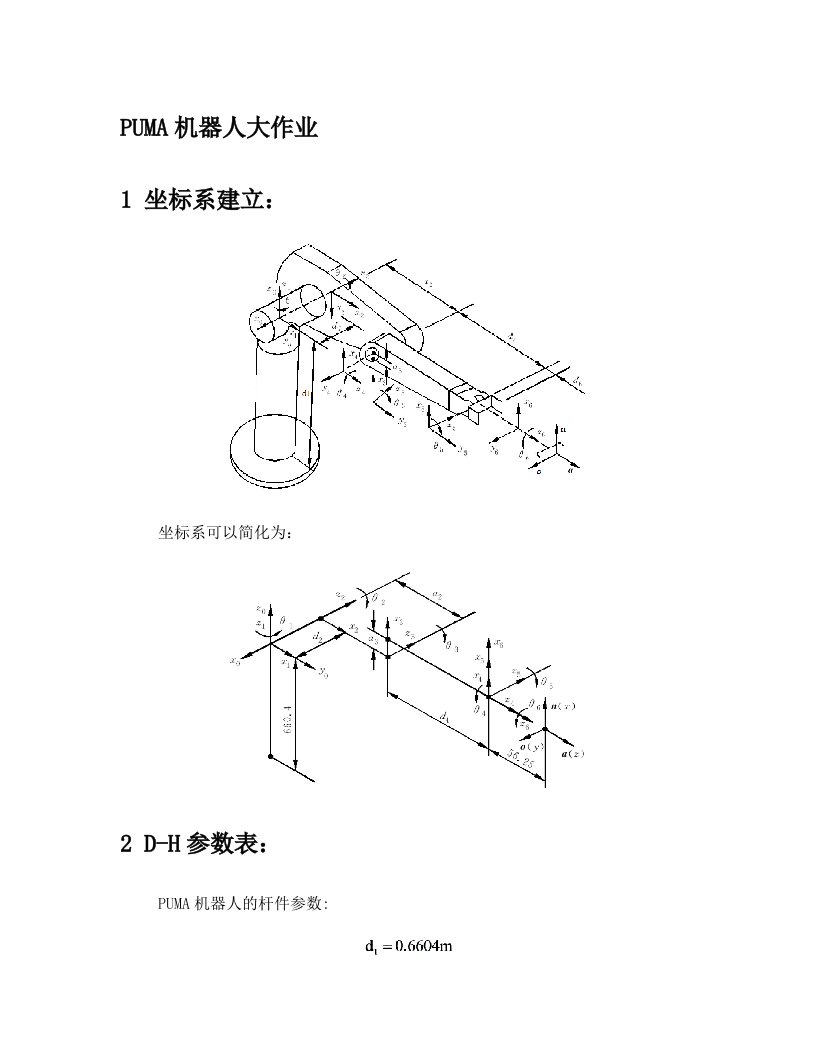
PUMA机器人大作业1 坐标系建立:坐标系可以简化为:2 D-H参数表:PUMA机器人的杆件参数:,,,,,关节运动范围190000-160o~160o20-900-225o~45o3-9000-45

 机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立) 机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立)
机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立) 机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立)